
工业机器人的种类很多,其功能、特征、驱动方式、应用场合等参数不尽相同。目前,国际上还没有形成机器人的统一划分标准。本书将主要从机器人的结构特征、控制方式、驱动方式、应用领域等几个方面进行分类。
机器人的结构形式多种多样,典型机器人的运动特征用其坐标特性来描述。按结构特征来分,工业机器人通常可以分为直角坐标机器人、柱面坐标机器人、球面坐标机器人(又称极坐标机器人)、多关节机器人、并连关节机器人等。
1.直角坐标机器人
直角坐标机器人是指在工业应用中,能够实现自动控制的、可重复编程的、在空间上具有相互垂直关系的三个独立自由度的多用途机器人,其结构如图所示。
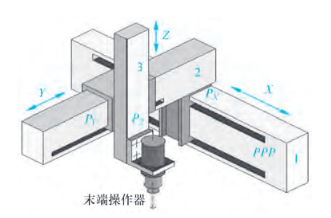
直角坐标机器人
从图中可以看出,机器人在空间坐标系中有三个相互垂直的移动关节X、Y、Z,每个关节都可以在独立的方向移动。
直角坐标机器人的特点是直线运动、控制简单。缺点是灵活性较差,自身占据空间较大。
目前,直角坐标机器人可以非常方便地用于各种自动化生产线中,可以完成诸如焊接、搬运、上下料、包装、码垛、检测、探伤、分类、装配、贴标、喷码、打码、喷涂、目标跟随以及排爆等一系列工作。
2.柱面坐标机器人
柱面坐标机器人是指能够形成圆柱坐标系的机器人,如图所示。其结构主要由一个旋转机座形成的转动关节和垂直、水平移动的两个移动关节构成。柱面坐标机器人末端执行器的姿态由参数(z,r,0)决定。
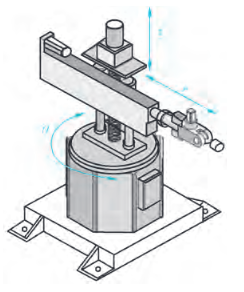
柱面坐标机器人
柱面坐标机器人具有空间结构小、工作范围大、末端执行器速度高、控制简单、运动灵活等优点。缺点是工作时,必须有沿r轴线前后方向的移动空间,空间利用率低。
目前,柱面坐标机器人主要用于重物的装卸、搬运等工作。著名的 Versatran机器人就是一种典型的柱面坐标机器人。
3.球面坐标机器人
球面坐标机器人的结构如图所示,一般由两个回转关节和一个移动关节构成。其轴线按极坐标配置,R为移动坐标﹐β是手臂在铅垂面内的摆动角,0是绕手臂支承底座垂直轴的转动角。这种机器人运动所形成的轨迹表面是半球面,所以称为球面坐标机器人。
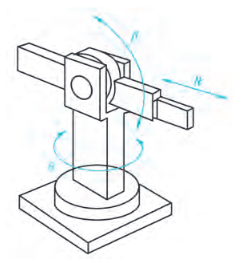
球面坐标机器人
球面坐标机器人同样占用空间小,操作灵活且范围大,但运动学模型较复杂,难以控制。
4.多关节机器人
关节机器人也称关节手臂机器人或关节机械手臂,是当今工业领域中应用最为广泛的一种机器人。多关节机器人按照关节的构型不同,又可分为垂直多关节机器人和水平多关节机器人。
垂直多关节机器人主要由机座和多关节臂组成,目前常见的关节臂数是3~6个。某品牌六关节臂机器人的结构如图所示。
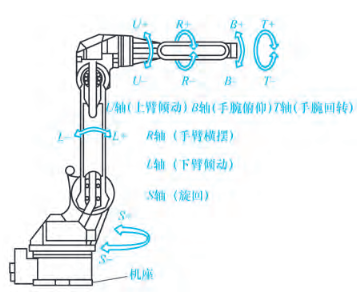
六关节臂机器人的结构
由图可知,这类机器人由多个旋转和摆动关节组成,其结构紧凑,工作空间大,动作接近人类,工作时能绕过机座周围的一些障碍物,对装配、喷涂、焊接等多种作业都有良好的适应性,且适合电动机驱动,关节密封、防尘比较容易。目前,瑞士ABB、德国KUKA、日本安川以及国内的一些公司都在推出这类产品。
水平多关节机器人也称为SCARA( Selective Comp-liance Assembly Robot Arm)机器人。水平多关节机器人的结构如图所示。这类机器人一般具有四个轴和四个运动自由度,它的第一、二、四轴具有转动特性,第三轴具有线性移动特性,并且第三轴和第四轴可以根据工作需要的不同,制造成多种不同的形态。

水平多关节机器人
水平多关节机器人的特点在于作业空间与占地面积比很大,使用起来方便;在垂直升降方向刚性好、尤其适合平面装配作业。
目前,水平多关节机器人广泛应用于电子产品工业、汽车工业、塑料工业、药品工业和食品工业等领域,用以完成搬取、装配、喷涂和焊接等操作。
5.并联机器人
并联机器人是近些年来发展起来的一种由固定机座和具有若干自由度的末端执行器、以不少于两条独立运动链连接形成的新型机器人。
图所示为六自由度并联机器人。和串联机器人相比,并联机器人具有以下特点:

并联机器人
1)无累积误差,精度较高。
2)驱动装置可置于定平台上或接近定平台的位置,运动部分重量轻,速度高,动态响应好。
3)结构紧凑,刚度高,承载能力大。
4)具有较好的各向同性。
5)工作空间较小。
并联机器人广泛应用于装配、搬运、上下料、分拣、打磨、雕刻等需要高刚度、高精度或者大载荷而无需很大工作空间的场合。
工业机器人根据控制方式的不同,可以分为伺服控制机器人和非伺服控制机器人两种。机器人运动控制系统最常见的方式就是伺服系统。伺服系统是指精确地跟随或复现某个过程的反馈控制系统。在很多情况下,机器人伺服系统的作用是驱动机器人机械手准确地跟随系统输出位移指令,达到位置的精确控制和轨迹的准确跟踪。
伺服控制机器人又可细分为连续轨迹控制机器人和点位控制机器人。点位控制机器人的运动为空间点到点之间的直线运动。连续轨迹控制机器人的运动轨迹可以是空间的任意连续曲线。
根据能量转换方式的不同,工业机器人驱动类型可以划分为液压驱动、气压驱动、电力驱动和新型驱动四种类型。
1.气压驱动
气压驱动机器人是以压缩空气来驱动执行机构的。这种驱动方式的优点是:空气来源方便,动作迅速,结构简单。缺点是:工作的稳定性与定位精度不高,抓力较小,所以常用于负载较小的场合。
2.液压驱动
液压驱动是使用液体油液来驱动执行机构的。与气压驱动机器人相比,液压驱动机器人具有大得多的负载能力,其结构紧凑,传动平稳,但液体容易泄漏,不宜在高温或低温场合作业。
3.电力驱动
电力驱动是利用电动机产生的力矩驱动执行机构的。目前,越来越多的机器人采用电力驱动方式,电力驱动易于控制,运动精度高,成本低。
电力驱动又可分为步进电动机驱动、直流伺服电动机驱动及无刷伺服电动机驱动等方式。
4.新型驱动
伴随着机器人技术的发展,出现了利用新的工作原理制造的新型驱动器,如静电驱动器、压电驱动器、形状记忆合金驱动器、人工肌肉及光驱动器等。
知识点词条:工业机器人的品牌与分类

