
在平面上建立直角坐标系以后,可用点到两条互相垂直的坐标轴的距离来确定点的位置,即平面内的点P与二维有序数组(a,b)一一对应。在空间建立三维直角坐标系后,可用点到三个互相垂直的坐标平面的距离来确定点的位置,即空间的点P与三维有序数组( a,b,c )一一对应。建立坐标系,如图1所示,取三条相互垂直的具有一定方向和度量单位的直线,称为三维直角坐标系R或空间直角坐标系OXYZ(也称右手坐标系,见图2)。利用三维直角坐标系可以把空间的点P与三维有序数组( a,b,c)建立起一一对应的关系。图3所示为典型的直角坐标机器人。
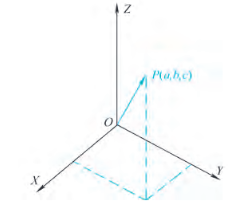
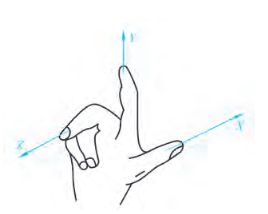
图1 空间直角坐标系 图2 右手坐标系
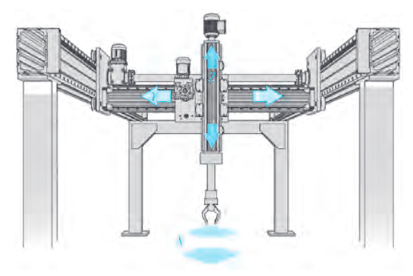
图3 直角坐标机器人
2.柱面坐标系
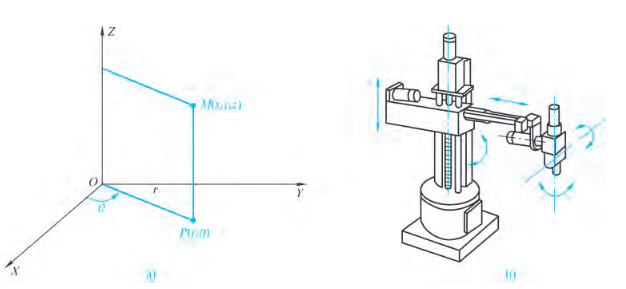
如图4a所示,设M(x,y,z)为空间内一点,并设点M在XOY面上的投影Р的极坐标为(r、θ),则这样的三个数r,6,z就叫作点M的柱面坐标。典型的柱面坐标机器人如图4b所示。
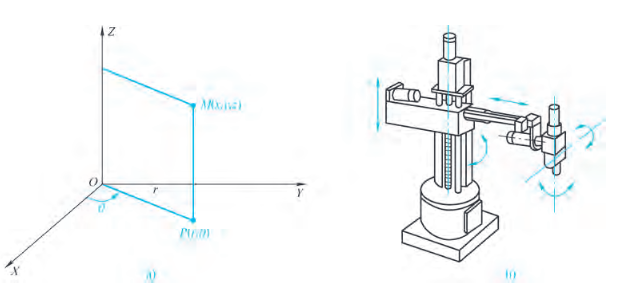
柱面坐标系及柱面坐标机器人
如图5a所示,假设P(x, y,z)为空间内一点,则点P也可用三个有次序的数(r,θ, φ)来确定,其中r为原点О与点P间的距离;θ为有向线段OP与Z轴正向的夹角;φ为从正Z轴来看,自X轴按逆时针方向转到OM所转过的角,这里M为点Р在XOY面上的投影。这三个数r,θ,φ称为点P的球面坐标。典型球面坐标机器人如图5b所示。
参考坐标系
4.机器人常用坐标系
在机器人学科里经常用参考坐标系和关节坐标系来描述空间机器人的位姿。
( 1)参考坐标系﹐参考坐标系的位置和方向不随机器人各关节的运动而变化,对机器人其他坐标系起参考定位的作用,通常采用三维空间中的固定坐标系OXYZ来描述,如图所示。在这种坐标系中无论手臂在哪里,X轴的正向运动就总是在X轴的正方向;Y轴的正向运动就总是在Y轴的正向;Z轴的正向运动就总是在Z轴的正向。参考坐标系用来定义机器人相对其他物体的运动以及机器人运动路径等。
( 2)关节坐标系关节坐标系用来描述机器人每一个独立关节的运动。如图所示,假设希望将机器人的末端运动到某一个特定的位置,可以每次只运动一个关节,从而把末端引导到目标位置上。在这种情况下,每一个关节单独控制,从而每次只有一个关节运动。由于所有关节的类型(移动型、旋转型、球型)不同,机器人末端的动作也各不相同。例如,如果是旋转关节运动,机器人末端将绕着关节的轴旋转。

关节坐标系
知识点词条:坐标系

