
工业机器人的动力系统(见图1)是驱使执行机构运动的装置,它将电能或流体能等转换成机械能、按照控制系统发出的指令信号,借助于动力元件使工业机器人完成指定的工作任务。它是使机器人运动的动力机构、是机器人的心脏。该系统输人的是电信号,输出的是线、用位移量。工业机器人的动力系统按动力源不同分为液压驱动、气动驱动和电动驱动三大类,也可根据需要由这三种基本类型组合成复合式的驱动系统。工业机器人以高精度和高效率为主要特征在各行各业广泛使用,采用电动机驱动最为普遍,但对于大型作业的机器人住往使用液压传动,较为简单的或要求防爆的机器人可采用气动执行机构。
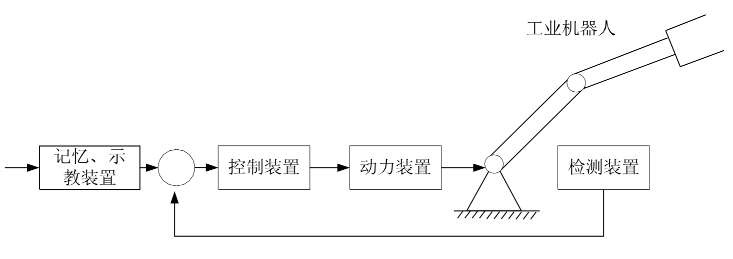
工业机器人动力系统
工业机器人动力系统按动力源不同可分为液压动力系统、气动动力系统和电动动力系统三大类。
1.液压动力系统
液压动力系统是利用储存在液体内的势能驱动工业机器人运动的系统,主要包括直线位移或旋转武活塞、液压何服系统。液压何服系统是利用间服间改空收流院马控制信号成比例地调节流速的一种方式。 液庆驱动的特点是动力大,力成力见惯量比大,响应快速,易于实现直接驱动等,故适于在承载能力大、惯量大、防爆环境条件下使用。但由于要进行电能转换为液压能的能量转换,速度控制多采用节流调速,效奉化电动驱动要低,液压系统液体带晶会计环境造成污染,工作噪声较高,一般中低负载的机器人动力原动系统多采川电动系统。
2.气动动力系统
气动动力系统是利用气动压力驱动工业机器人运动的系统,般山活塞 和控制间组成。 儿特点是速度快,系统结构简单, 维修方便,价格低廉, 适于中小负何机器人使用。但实现何服控制困难,多用于程序控制的机器人中,如上下料、冲压等。
3.电动动力系统
电动动力系统有步进电动机驱动、直流伺服电动机驱动和交流伺服电动机驱动等方式。近十年来,低惯量、大转矩交直流伺服电动机及其配套的伺服驱动器广泛用于各类机器人中。其特点是:不需能量转换,使用方便,噪声较低,控制灵活。大多数电动机后面需装精密的传动机构,直流有刷电动机不能用于要求防爆的环境中。近几年义开发了直接驱动电动机,使机器人能快速、高精度定位,已广泛用于装配机器人中。
上述三种动力系统的优缺点见表。
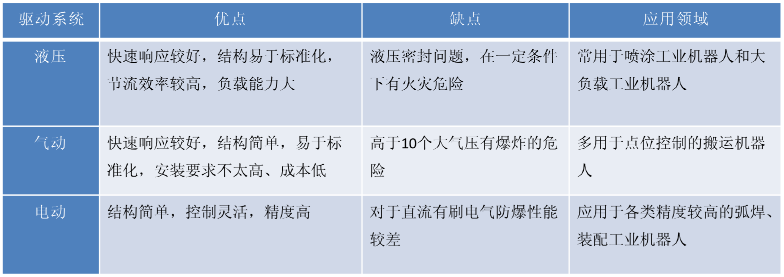
工业机器人三种动力系统的比较分析动力系统
知识点词条:工业机器人动力系统

